04 Jan 2014
As capnproto-rust approaches full feature support for Cap’n Proto serialization, now is an apt time to validate its usefulness on a slightly more involved example.
Thus I present zmq-explorers, a toy data pipeline which uses ZeroMQ as a transport layer.
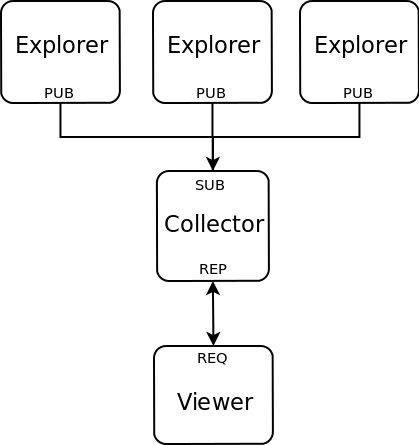
The pipeline looks like this:
At the input end are any number of “explorer” nodes gathering data. In the middle is a “collector” node aggregating and processing the data. At the end is a “viewer” node consuming the processed data. The explorers communicate to the collector via a publish/subscribe pattern, and the viewer communicates with the collector via a request/reply pattern. ZeroMQ makes this communication quite simple to express, and Cap’n Proto operates directly on the bytes moved by ZeroMQ — no copying or parsing is necessary.
Concretely, the observations of the explorers are color values from an image:
struct Observation {
timestamp @0 : Int64;
x @1 : Float32;
y @2 : Float32;
red @3 : UInt8;
green @4 : UInt8;
blue @5 : UInt8;
diagnostic : union {
ok @6 : Void;
warning @7 : Text;
}
}
Each explorer randomly moves within the two-dimensional space of the image, reporting the colors it observes, fudged by some noise.
The collector maintains a grid that aggregates the reported observations:
struct Grid {
cells @0 : List(List(Cell));
numberOfUpdates @1 : UInt32;
latestTimestamp @2 : Int64;
struct Cell {
latestTimestamp @0 : Int64;
numberOfUpdates @1 : UInt32;
meanRed @2 : Float32;
meanGreen @3 : Float32;
meanBlue @4 : Float32;
}
}
The collector sends its current grid to the viewer whenever it is requested.
Here is what the viewer might see if there are three explorers:
The image on left shows the current best estimate of the
data. The image on the right shows
a crude measure of confidence in the estimate;
green represents the value of the numberOfUpdates field,
and blue represents the value of the latestTimestamp field
relative to the current time.